Hi all,
After a little bit of playing around I’ve got Manjaro Arm to install on the eMMC of the Pine64 SOQuartz CM4 module with my DeskPi Super6C carrier board. I’m using the DTS for the soquartz-cm4io at the moment which isn’t an exact match, but gets me far enough to see what Linux makes of the system.
A couple of oddities I wanted to mention. Not sure if these should be bug reports or not so please advise.
-
After initial install and reboot (to the now expanded eMMC) when trying to do anything with pacman or the install software GUI it fails complaining that /var/lib/pacman doesn’t exist (or similar… I stupidly didn’t take a picture correctly…). Creating this folder as root meant I could then issue a pacman -Syu successfully, and open Software Install and install other packages. Weird that this folder isn’t there in the first place, or created by the installer.
-
Second oddity is that I was running lspci, lsblk etc and realised lsusb wasn’t installed. So I went to the GUI software installer and installed usbtools, none of the python options, but installed all the dependencies. This took a while and paused on the final step. When clicking on full details you see it complains that /bin and /lib exists (well… I should hope they do!!!) and renames them to /bin.old and /lib.old respectfully… You can guess what happens next? Stuck. Cannot run commands, a reboot causes the system to now hang. Picture of the install message below.
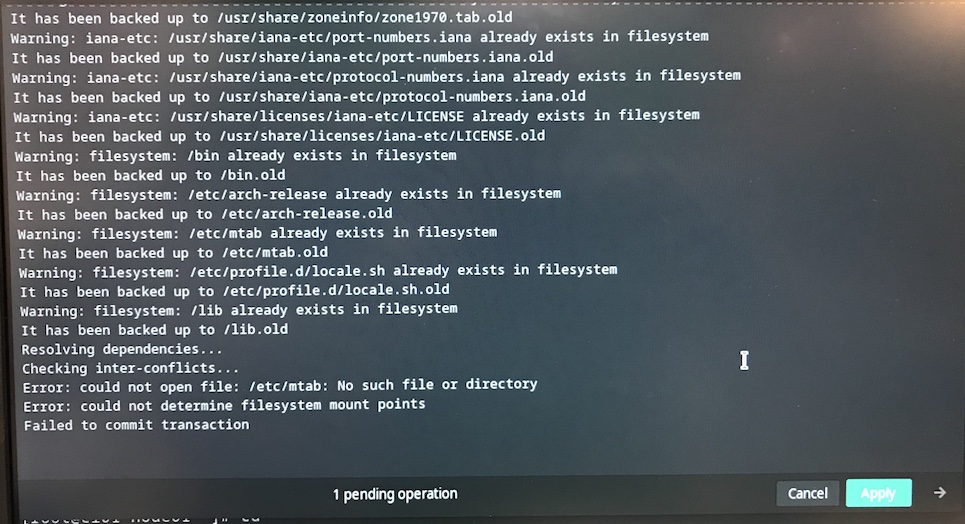
I would have expected checks to be in the OS for both of the above eventualities. Bit strange this happened at all so thought I’d best let someone know it has happened. Entirely possible I’m doing something daft of course. I’m using Manjaro Arm 22.06 xfce.
One more thing, I plan to create my own DTS file for this board based on the limited info I got so far. If there’s any pointers on ‘how to add a dts file to linux’ and then ‘how to ensure a new dts file results in a dtb in the Manjaro u-boot’ I’d be very appreciative. I’ve managed to download the linux-quartz64 manjaro arm repo and build that successfully - I just need to know how to add another ‘supported board’ for my own testing prior to testing, then eventually submitting patches to the Linux Kernel team and the Manjaro Arm team.
I’m documenting my progress on all this here: GitHub - adamfowleruk/deskpi-super6c: A repo to hold useful information and files for my exploration of the DeskPi Super6C CM4 carrier board
Thanks in advance.